Fahrzeugübergreifende Kommunikationssysteme (IVC) versprechen viele potenziell nützliche Dienste. Stellen Sie sich einen adaptiven Geschwindigkeitsregler vor, der unterschiedliche Geschwindigkeiten und Positionen von Fahrzeugen in der Nähe überwacht, um die Geschwindigkeit automatisch anzupassen und Kollisionen zu vermeiden. Verkehrsstaus können durch die Übermittlung von Echtzeitdaten und die Umleitung von Autofahrern auf weniger befahrene Straßen reduziert werden. Diese Maßnahmen könnten sogar zu einer Verringerung der Umweltverschmutzung führen, da sich die Gesamtreisezeit verkürzt.
Leider ist eine stabile Kommunikationsverbindung mit zahlreichen Herausforderungen verbunden. IVC-Systeme müssen in der Lage sein, omnidirektionale Signale zu senden und zu empfangen. Eine einzelne Antenne kann dieses Ziel erreichen, wenn sie perfekt platziert ist; Fahrzeuge bieten jedoch nur sehr wenige praktische Montagepositionen. Dies schließt im Allgemeinen die Möglichkeit einer optimalen Platzierung aus und führt zur Verwendung mehrerer Antennen. Bei dieser MIMO-Anordnung muss der Konstrukteur eine vollständige Abdeckung sicherstellen. Die Auswirkungen der Fahrzeugform und der Materialzusammensetzung erschweren die Bemühungen zusätzlich, da diese Eigenschaften die Impedanz und die Strahlungseigenschaften der Antenne beeinflussen.
Bei der Entwicklung von IVC-Systemen spielen auch externe Variablen eine Rolle. Diese Produkte müssen in einer Reihe von Umgebungen und unter verschiedenen Betriebsbedingungen funktionieren. Die Anwesenheit eines nahen Traktoranhängers kann Signale reflektieren oder blockieren. Auf einer nassen Straße breiten sich die Felder anders aus als auf einer trockenen, und die Ausbreitung in Straßenschluchten macht vielen Kommunikationssystemen zu schaffen.
Die Entdeckung und Beseitigung solcher Hindernisse in der Entwurfsphase verringert die Möglichkeit kostspieliger Nachbesserungen erheblich und verbessert die Chancen auf eine erfolgreiche Produkteinführung erheblich; Messungen allein können sich jedoch als unzureichend erweisen. Es kann schwierig oder unmöglich sein, eine Vielzahl von Fahrzeugen für Tests zu bekommen. Das Versetzen einer Antenne an verschiedene Montageorte und das Durchführen neuer Messungen ist zeitaufwändig, und das System kann nicht immer in seiner tatsächlichen Betriebsumgebung getestet werden. Außerdem können Messungen erst nach Abschluss der Konstruktion und Fertigung durchgeführt werden. Die Kosten und der Zeitaufwand für die Herstellung können zu langen und teuren Entwicklungszyklen führen.
XFdtd bietet ein genaues und effizientes Mittel zur Modellierung dieser Probleme. Es bietet den Ingenieuren die vollständige Kontrolle über die Anzahl und Art der vorhandenen Fahrzeuge sowie über die Umgebungsbedingungen. Der Entwurf einer Antenne oder eines Arrays in XF geht nahtlos in In-Situ-Tests mit derselben Anwendung über, und durch die Bewertung tatsächlicher Betriebsszenarien vor der Fertigung entsteht ein robusterer Entwurfsprozess.
In diesem Beispiel wird ein IVC-System betrachtet, das im Autobahnverkehr auf trockener Fahrbahn eingesetzt wird. Zwei Personenkraftwagen befinden sich auf der rechten Fahrspur der Autobahn, während sich links von ihnen ein großer Sattelzug befindet (siehe Abbildung 1). Ein vertikaler, auf 5,9 GHz abgestimmter Monopol, der auf dem hinteren Auto montiert ist, dient als IVC-Sender. Die ersten Simulationen erfassen die Feldinteraktionen zwischen den drei Fahrzeugen und der Straßenoberfläche, um die Durchführbarkeit von komplexeren Experimenten in der Zukunft zu bestimmen.
Unser Beispiel beginnt mit der Konstruktion der Straße unter den Autos. Der 12 Meter lange Autobahnabschnitt in Abbildung 1 wurde mit den benutzerfreundlichen und dennoch leistungsstarken CAD-Modellierungswerkzeugen von XF erstellt. Eine kurze Online-Suche ergab CAD-Dateien, die eine breite Palette von Fahrzeugmarken und -modellen abdecken. XF unterstützt eine Vielzahl von CAD-Formaten, was es einfach macht, kompatible Dateien für den Import zu finden; außerdem enthalten die integrierten Materialbibliotheken bereits die meisten der für diese Arbeit benötigten Materialien. Abbildung 2 zeigt mehrere Materialien, die dem Projekt aus den installierten Materialbibliotheken hinzugefügt wurden. Durch die Nutzung vorhandener CAD- und Materialbibliotheken verbringen die Ingenieure weniger Zeit mit der Erstellung von Modellen oder der Suche nach Materialeigenschaften, was die Zeit für die Projekteinrichtung reduziert.
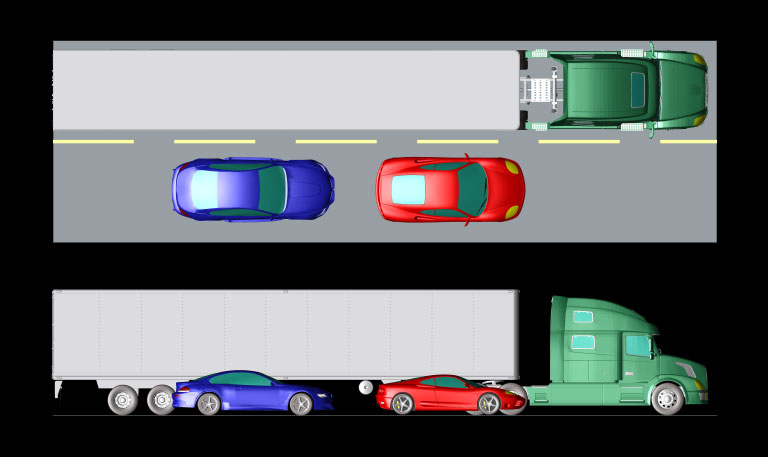
Abbildung 1: Aufbau mit zwei Personenkraftwagen und einer Sattelzugmaschine auf einer Fahrbahn.
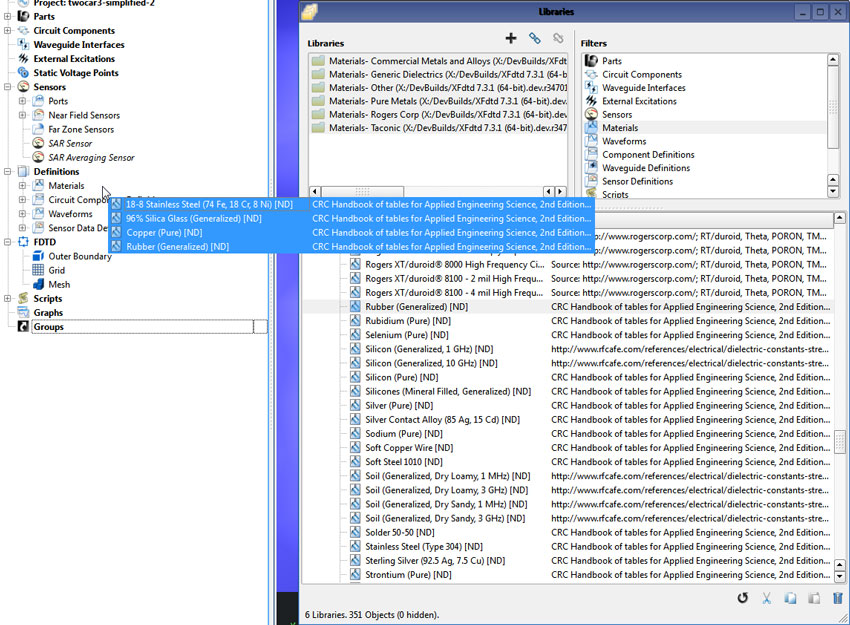
Abbildung 2: Hinzufügen von Materialien zum XF-Projekt.
Jedes Fahrzeug wurde mit Hilfe von parametrierbaren Arbeitskoordinatensystemen auf der Fahrbahnoberfläche platziert. Dies ermöglicht spätere Experimente zur Systemleistung in Abhängigkeit von der Position relativ zu anderen Fahrzeugen. Video 1 zeigt, wie ein Parameter-Sweep eine Fahrzeugposition verändern kann. In diesem unmittelbaren Beispiel ist die Position so eingestellt, dass die beiden Fahrzeuge etwa 1,5 Meter voneinander entfernt sind.
Für diese Arbeit wurden mehrere potenzielle Montageorte in Betracht gezogen, darunter der vordere Stoßfänger, das Dach und der Kofferraum. Die Locator-Funktion in XF ermöglicht es dem Benutzer, die Antennenstandorte schnell zu wechseln, um die Untersuchung der Antennenplatzierung zu erleichtern. Video 2 demonstriert die Verwendung des Locators. Letztendlich dient die am Ende des Videos gezeigte, häufig verwendete Position des vorderen Stoßfängers als Montagepunkt für unser Beispiel.
Das Gesamtvolumen des Problemraums beträgt 3,6x106 λ3, was über 3,7 Milliarden Zellen ergibt, wenn sie vernetzt sind, und fast 120 GB RAM für die Simulation erfordert. Ein derartig großer elektrischer Raum hätte vor nicht allzu langer Zeit die Verwendung eines Full-Wave-Solvers ausgeschlossen; dank Remcoms MPI + XStream und der Unterstützung großer Speicher kann XF dieses Problem jedoch problemlos lösen. Diese Simulation wurde in etwa 22 Minuten mit 24 M2090-GPUs auf dem PSG-Cluster von NVIDIA abgeschlossen, wobei die Zeit mit freundlicher Genehmigung der NVIDIA Corporation zur Verfügung gestellt wurde.
Die Abbildungen 3 und 4 zeigen die stationären elektrischen Felder bei 5,9 GHz in einem ebenen Schnitt durch die Mitte der beiden Autos. Die Ergebnisse reichen von -20 dB (rot) bis -100 dB (schwarz). Abbildung 5 zeigt eine Draufsicht auf einen ebenen Ausschnitt der Felddaten, die in Höhe des Senders gespeichert wurden, und Abbildung 6 zeigt eine Nahaufnahme der Feldwechselwirkungen zwischen den beiden Autos. Die übrigen Abbildungen zeigen die gleichen Daten aus verschiedenen Blickwinkeln.
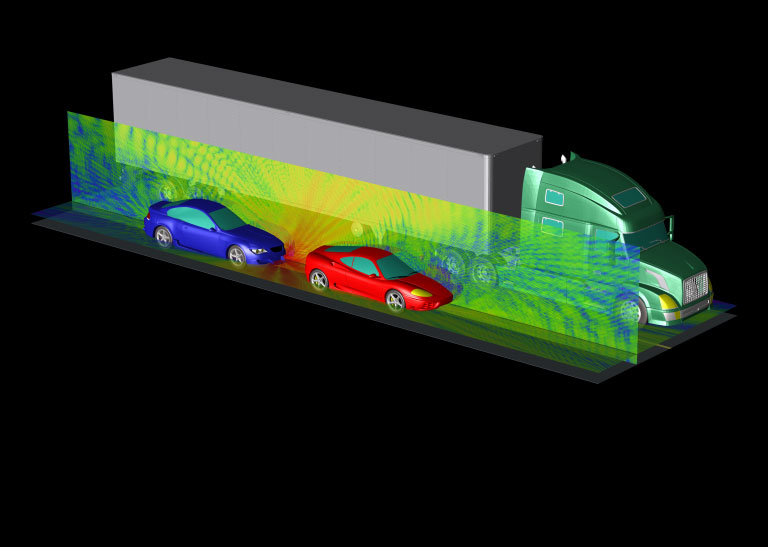
Abbildung 3: Ergebnisse des stationären elektrischen Feldes bei 5,9 GHz in der Nähe des Senders.

Abbildung 4: Ergebnisse des stationären elektrischen Feldes in der vertikalen Ebene, die den Sender enthält.
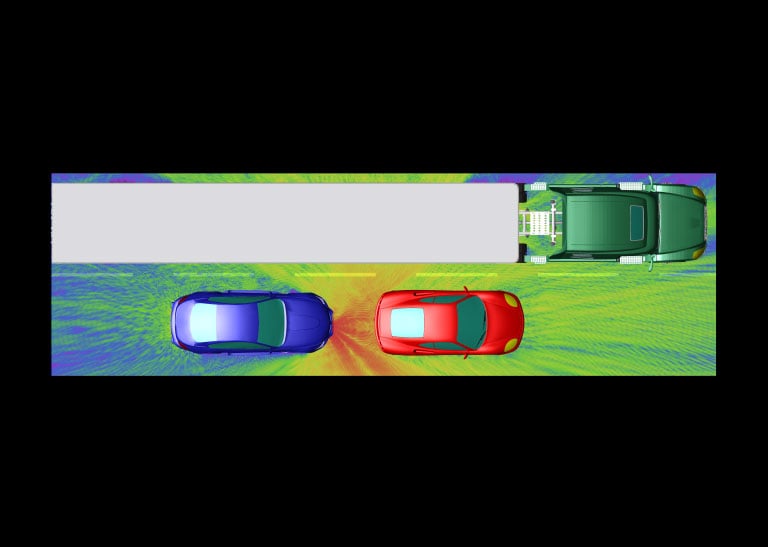
Abbildung 5: Ansicht von oben auf die stationären elektrischen Felder bei 5,9 GHz.
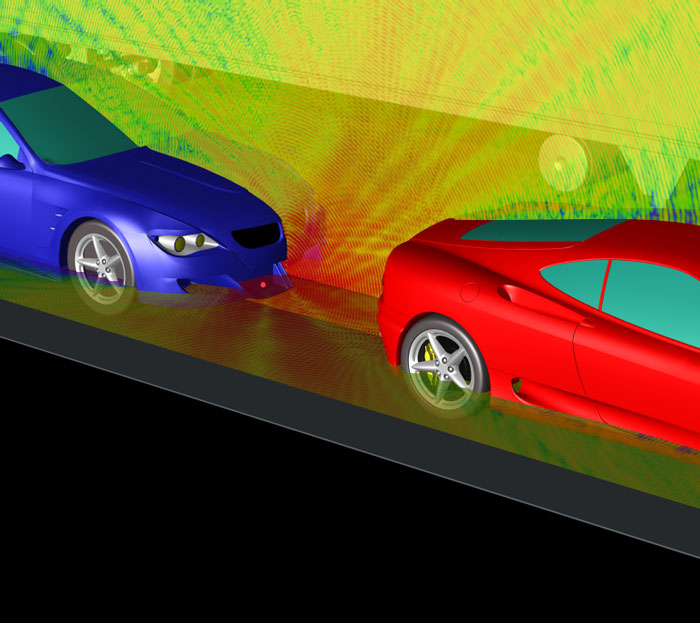
Abbildung 6: Ergebnisse des stationären elektrischen Feldes bei 5,9 GHz in der Nähe des Senders (roter Punkt).
Nach Abschluss dieser Proof-of-Concept-Arbeiten können wir nun mit weiteren Untersuchungen fortfahren. Künftige Arbeiten werden die Auswirkungen der Fahrzeugpositionen auf die Kommunikationsverbindung untersuchen. Wir können auch die Auswirkungen der Antennenplatzierung und der Materialzusammensetzung der Fahrzeuge berücksichtigen. Umgebungsvariablen können modelliert werden, z. B. der Vergleich der Leistung auf einer trockenen und einer nassen Straße oder in einer städtischen Schlucht statt auf einer Autobahn. Die Kombination von MPI und XStream GPU-Beschleunigung gibt dem Entwicklungsingenieur die Möglichkeit, dieses komplexe Problem vollständig zu charakterisieren und zu verstehen.


