







.webp?width=269&height=254&name=image-asset%20(4).webp "Polarkoordinatensystem")
Webinare
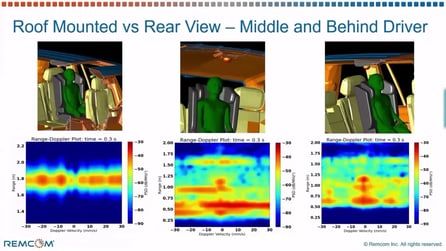
Weiterentwicklung der Simulation von Radarerfassung unter Einbeziehung von Personenerkennung und Mikrodoppler in komplexen Umgebungen
In diesem Webinar stellen wir eine Methode zur Modellierung von Radarrückstrahlungen und Abschattungen durch Menschen vor, einschließlich der Auswirkungen von Atmung und Herzfrequenz auf den Mikro-Doppler.
Erkunden Sie Ressourcen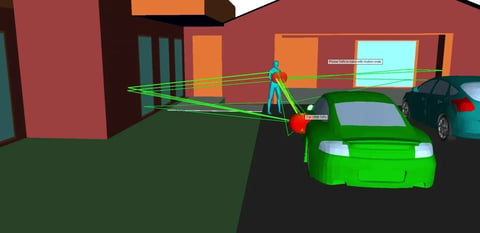
Videos
Simulieren Sie dynamische drahtlose Mobilität mit Wireless InSite
In diesem Video werden die Mobilitätsfunktionen von Wireless InSite demonstriert, darunter die Radarabdeckung in der Fahrzeugkabine und die Visualisierung von Ultrabreitband (UWB), die Erkennung der Anwesenheit von Kindern, sich bewegende Plattformen mit geschwindigkeits- und zeitbasierten Bewegungen und Simulationen von RF-Systemen auf dem Mond.
Erkunden Sie Ressourcen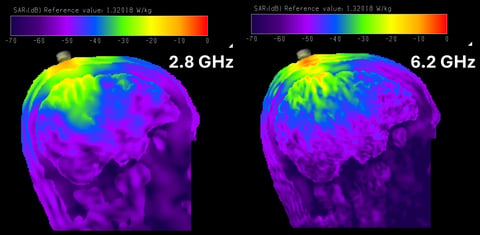
Anwendungsbeispiele
XFdtd SAR-Simulationen eines künstlichen Hirncomputerimplantats
Dieses Beispiel zeigt Simulationen der spezifischen Absorptionsrate (SAR) für ein Brain Computer Implant (BCI) in erster Näherung. Es wurde unter Verwendung eines quelloffenen und anonymisierten Datensatzes von Kopfmodellen von Patienten erstellt, der fünf Gewebekompartimente umfasst (Kopfhaut, Schädel, Liquor, graue und weiße Substanz).
Erkunden Sie RessourcenSparen Sie Zeit und reduzieren Sie Kosten.
Wenden Sie sich noch heute an Remcom, um eine maßgeschneiderte Lösung für Ihre komplexen elektromagnetischen Herausforderungen zu erhalten.
Angebot anfordern