 Zusammenfassung:
Zusammenfassung:
Die Trends im Bereich der Fahrzeugsicherheit führen dazu, dass Radarsysteme immer präziser und zuverlässiger werden, um tote Winkel zu erkennen und Kollisionen zu vermeiden. Folglich müssen die Ingenieure besser verstehen, wie sich Halterungen, Armaturenbrett, Lackfarbe und Stoßfänger auf die Fernfeldabstrahlungsmuster von 24-GHz- und 77-GHz-Automobilradarsystemen auswirken. Die elektromagnetische (EM) Simulation, die lange Zeit für Simulationen von Antennen auf Fahrzeugen mit niedrigeren Frequenzen (und größeren Wellenlängen), einschließlich der Fahrzeug-zu-Fahrzeug-Kommunikation, verwendet wurde, kann jetzt eine High-Fidelity-Analyse durchführen, die über den idealen 24-GHz- und 77-GHz-Sensor selbst hinausgeht und auch das Antennenpaket und die Karosseriemerkmale rund um das Gerät einschließt.
In diesem Beitrag wird ein 24-GHz-Sensor verwendet, um die Unterschiede zwischen der Simulation eines freistehenden Sensors und eines in einem Fahrzeug eingebauten Sensors zu erörtern. Effiziente Finite-Differenzen-Zeitbereich (FDTD)- EM-Analysen, kombiniert mit einer drastischen Beschleunigung der Berechnungen durch CUDA-fähige Grafikprozessoren (GPUs), machen Remcoms XFdtd®, ein vollständig arbiträres 3D-EM-Simulationswerkzeug, zur optimalen Wahl für die Simulation eines Antennen-in-System-Designs mit diesem Komplexitätsgrad.

Die XFdtd-Simulation eines 24-GHz-Sensors, der in der hinteren Stoßstange einer Limousine montiert ist, bildet den Rahmen für die Diskussion in diesem Papier.
Design-Herausforderungen bei hohen Frequenzen
Die kürzeren Wellenlängen von 24 GHz und 77 GHz stellen das Design vor Herausforderungen, die bei Anwendungen mit niedrigeren Frequenzen, wie der Fahrzeug-zu-Fahrzeug-Kommunikation bei 5,9 GHz, nicht auftreten. Auf der Sensorebene werden die Strukturen in den Leiterplattenschichten elektrisch groß und können unerwartete Störungen verursachen. Wenn der Sensor in ein Fahrzeug eingebaut wird, kann die Dicke der Verkleidung die abgestrahlten Wellen verzerren und unerwünschte Reflexionen verursachen. Einige dieser Probleme führen zu einer Änderung des Sensordesigns, während andere besser durch die Bereitstellung von Richtlinien für die Automobilhersteller gelöst werden können. In jedem Fall benötigen die Ingenieure ein Werkzeug, das eine realitätsnahe Analyse ermöglicht und sie in die Lage versetzt, Probleme in ihrem Design aufzuspüren und dabei alle Aspekte zu berücksichtigen, die die Leistung eines Sensors beeinflussen.
Radar ist von Natur aus im Zeitbereich angesiedelt
Radar ist von Natur aus ein Zeitbereichsprozess: Ein Signal geht von einem Sender aus, wird von einem Objekt reflektiert und kehrt zum Empfänger zurück. Während ein Großteil des Radardesigns auf Systemebene mit mathematischen Signalverarbeitungskonzepten erfolgt, können Signalintegritätsprobleme auf der lokalen Radarplatine auftreten und die Gesamtleistung des Radarsystems beeinträchtigen. Die bloße Betrachtung des Frequenzinhalts dieser unerwünschten Strom- oder Spannungsproblembereiche liefert möglicherweise nicht genügend Informationen, um das Radarsystem gründlich zu entwerfen oder Fehler zu beheben.
Mit der FDTD-EM-Simulation lässt sich die Bewegung von Signalen als Funktion der Zeit darstellen. Die Verfolgung der Quelle eines bestimmten Stroms oder einer bestimmten Spannung, die in einen problematischen Bereich der Schaltung fließt, kann die Ursache eines Leistungsproblems in einem Radargerät aufdecken. Das Problem kann von einer unerwünschten Kopplung zwischen den Signalleitungen auf der Leiterplatte herrühren. Das Problem kann durch Energie entstehen, die von der Antenne oder einem anderen Teil der Schaltung mit hohem Q-Wert zurückgeworfen wird. Diese zeitabhängigen Phänomene lassen sich mit einem reinen Frequenzbereichskonzept nicht klar erkennen; um diese Art von Problemen zu finden, ist eine Zeitbereichssimulation erforderlich.
Felder im Zeitbereich zeigen Wechselwirkungen innerhalb des Sensors.
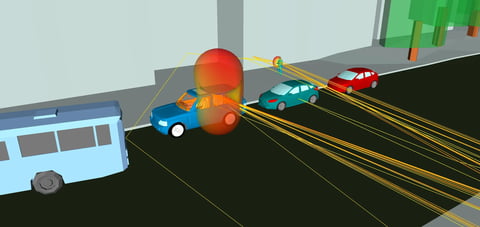
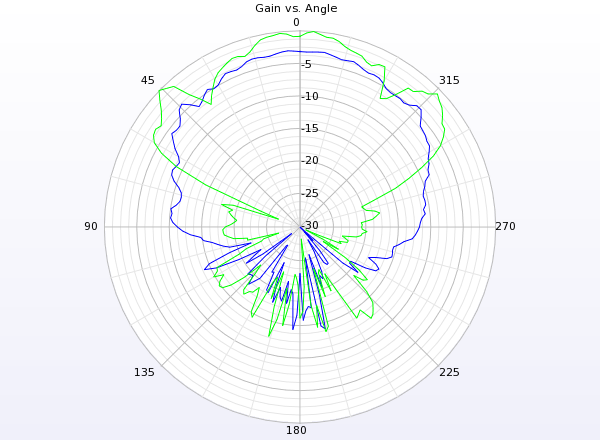
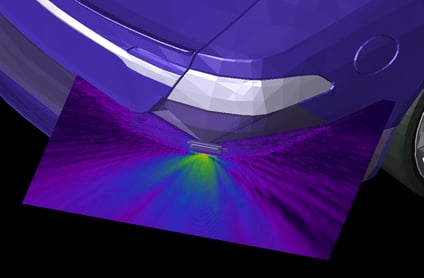
Sobald der Sensor an einem Fahrzeug montiert ist, können Störungen an der Empfangsantenne die Zielidentifizierung erschweren. Diese Störungen können durch eine Resonanzanordnung in der Stoßstange oder durch Reflexionen an den Halterungen verursacht werden. FDTD-EM-Simulationen und die GPU-Computertechnologie ermöglichen jetzt die Einbeziehung größerer Strukturen, wie z. B. des Stoßfängers oder der Heckpartie eines Fahrzeugs, in die Simulationen von Radargeräten für Kraftfahrzeuge. Realitätsgetreue EM-Simulationen von 24-GHz- oder 77-GHz-Radargeräten, die in Stoßfängern montiert sind, können Anwendungsingenieuren und ihren Kunden dabei helfen, die Antennenleistung und deren Veränderungen in Abhängigkeit von der Fahrzeugstruktur und den Materialien während des Designzyklus gründlich zu untersuchen.
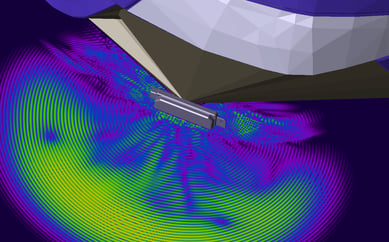
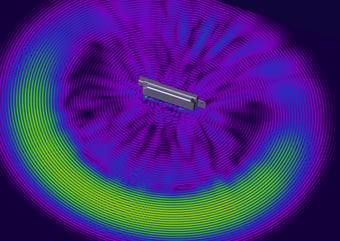
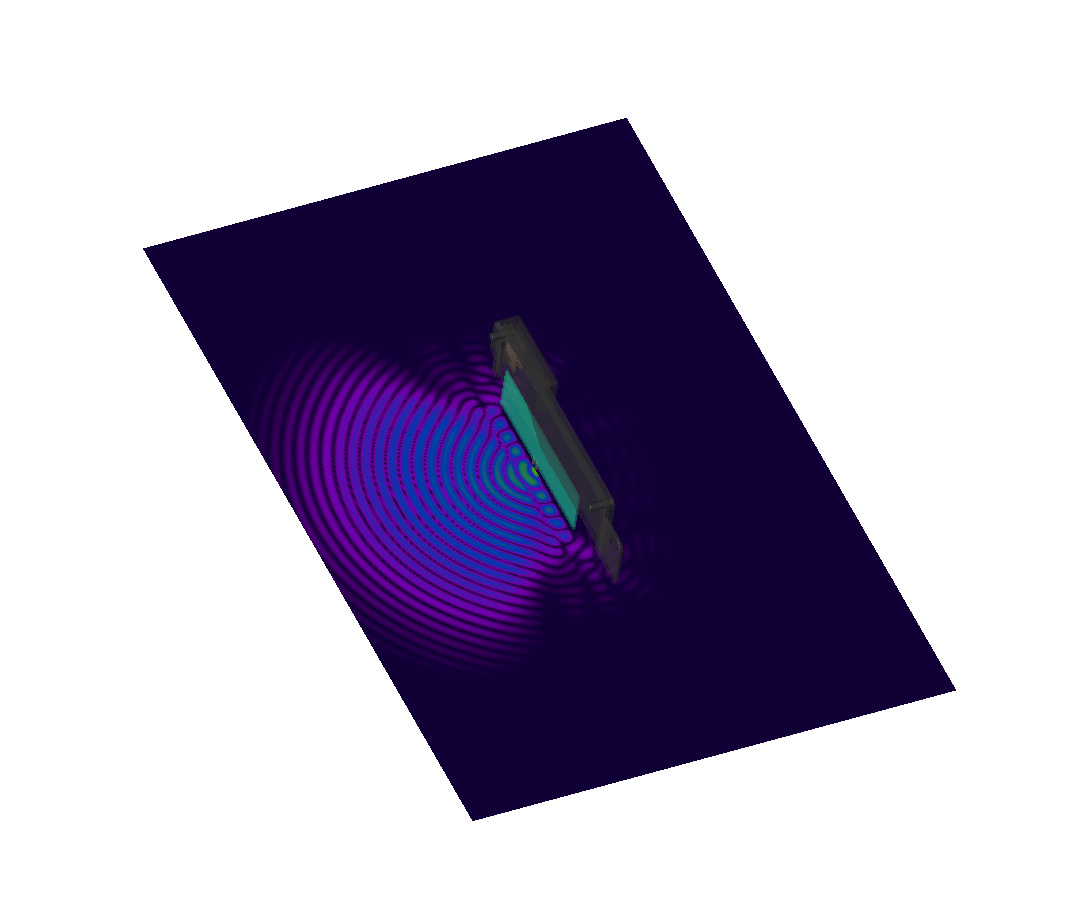
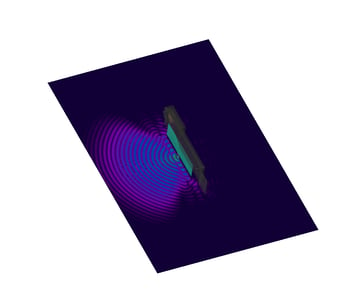
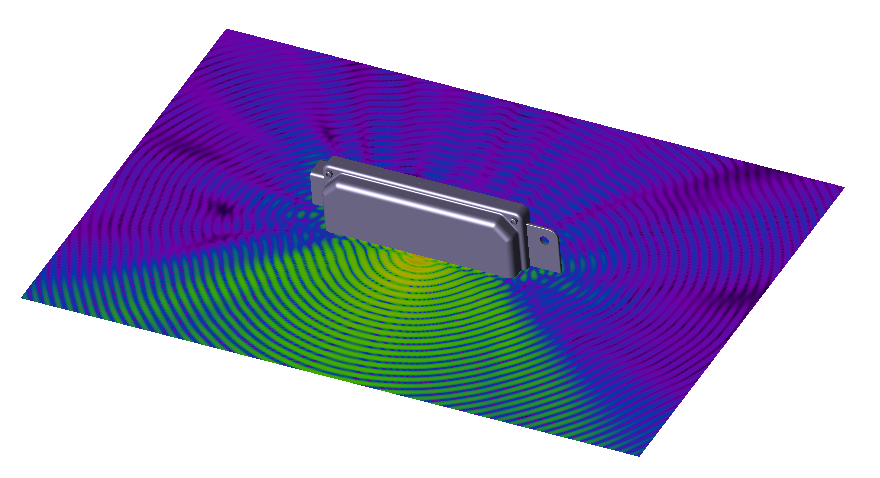
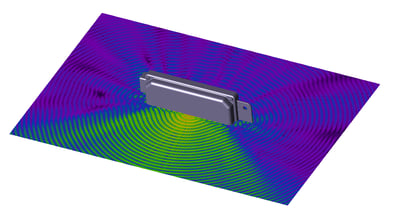
Verteilung der elektrischen Felder 1,8 ns nach dem Start.
In den obigen Abbildungen werden die elektrischen Felder verglichen, wie sie sich vom Sensor wegbewegen. Im Gegensatz zu dem freistehenden Gehäuse auf der rechten Seite zeigt das Gehäuse auf der linken Seite, dass die Blende Wellen einfängt. Dies ist unerwünscht, weil es die übertragenen Felder verzerrt und weil die gefangenen Felder in den Empfänger zurückreflektiert werden und Interferenzen verursachen.
Parametrisierung geht über die Antenne hinaus
Bei der Entwicklung von Radarsystemen für Fahrzeuge müssen nicht nur die idealen Antenneneigenschaften im Frequenzbereich analysiert und simuliert werden. Verpackungsdetails in der Nähe der Antenne sowie Merkmale der Fahrzeugkarosserie, die etwa einen Meter von der Antenne entfernt sind, beeinflussen ebenfalls die Fernfeldmuster der Antenne und die Leistung des Radarsystems. Bereits bei der Konstruktion der Antenne kann die Ausrichtung mehrerer Schichten (Registrierung) während der Montage die Leistung der Antenne beeinflussen. Die Kanteneffekte eines Leiterplattendielektrikums, Montageschrauben, mit denen die Leiterplatte an einem Gehäuse befestigt ist, und eine Gehäuseabdeckung oder ein Radom über der Antenne können das Strahlungsdiagramm der Antenne verändern oder Zeitbereichsreflexionen zurück zur Antenne verursachen, die im Systemdesign nicht berücksichtigt werden. Nicht nur die Verpackung des Radargeräts, sondern auch der Stoßfänger und der gesamte angrenzende Bereich des Fahrzeugs beeinflussen die Leistung der Antenne und des Radarsystems. Die Berücksichtigung von Fahrzeug- und Stoßfängermaterialien, -formen, -abmessungen und Geräteverpackungen führt zu vielen Variablen, die bei der Entwicklung von Radarsystemen berücksichtigt werden müssen.
Ein Ansatz zur Prüfung mehrerer Variationsdimensionen - Stoßfängerwerkstoffe, Lackschichten und -dicken - sind Parameter-Sweeps in der EM-Simulation. Nahezu jede Größe, die in einer Simulation angegeben wird, kann als Variable verwendet werden und so auf automatisierte Weise über eine Reihe von Werten gesweept werden. Parametrische Sweeps können Geometrien variieren, z. B. die Einbauposition des Kfz-Radargeräts horizontal entlang des Stoßfängers und um seine gebogene Ecke. Verschachtelte Sweeps, bei denen mehr als ein Parameter auf einmal variiert wird, sind nützlich, um den Entwurfsraum schon früh im Entwurfszyklus zu erkunden und ein wertvolles Verständnis und eine Intuition für die Systemleistung zu gewinnen. Sensitivitätsanalysen und Optimierungen ändern ebenfalls Parameterwerte in mehreren Simulationsiterationen; diese werden in der Regel später im Designzyklus zur Validierung verwendet.
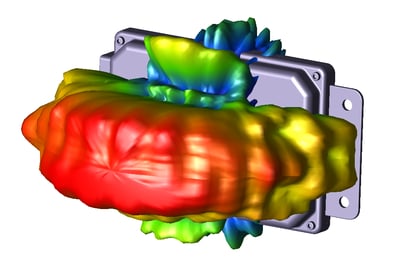
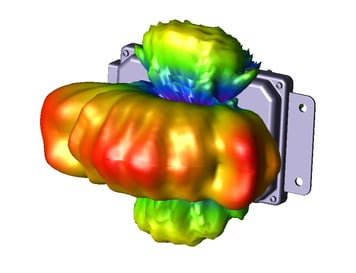
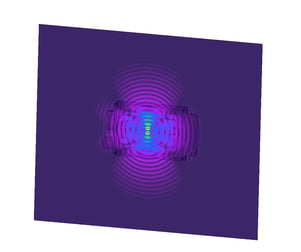
Die parametrische Analyse wird zur Verbesserung der Entwurfsleistung eingesetzt.
Größe der Fahrzeugsimulation im Verhältnis zur Wellenlänge
Die Simulation einzelner Antennenstrukturen und ihrer Fernfeld-Strahlungsdiagramme ist seit vielen Jahren ein fester Bestandteil von EM-Simulationssoftware. Dies gilt sowohl für freistehende Antennen als auch für On-Chip-Antennen, die eng mit Verstärkern in integrierten Schaltungen (ICs) verbunden sind. In jüngster Zeit, mit dem Aufkommen der 64-Bit-Computer und der damit verbundenen Vergrößerung des Arbeitsspeichers, der für individuelle Simulationen zur Verfügung steht, hat sich die EM-Simulation auf Antennen und Fahrzeuge ausgeweitet; das Fahrzeug kann jedoch in einer anderen EM-Formulierung dargestellt werden, die nur die Metalloberfläche eines Autos, Satelliten, Schiffs oder Flugzeugs betrachtet.
Die Herausforderung bei der hochpräzisen Simulation von Antennenstrukturen und Fahrzeugen mit einer völlig willkürlichen 3D-EM-Simulation liegt in der Größe des Simulationsproblems, die oft durch die Anzahl der Elemente im Netz oder den RAM-Bedarf (Speicher) beschrieben wird. Eine Simulation, die zu viele GB Arbeitsspeicher benötigt, wird unpraktisch, entweder weil sie zu viele Stunden dauert oder weil die Simulation die verfügbaren Hardwarekapazitäten des Computers völlig übersteigt.
GPUs reduzieren die Simulationszeit für 4 GB und 20 GB Probleme.
Die EM-Simulation einer Antenne skaliert im Allgemeinen mit der Signalfrequenz, da die Genauigkeit der EM-Simulation weitgehend auf der Anzahl der Maschenzellen pro Wellenlänge beruht. Die Simulation einer Dipolantenne mit halber Wellenlänge benötigt bei niedrigen und hohen Frequenzen etwa die gleiche Simulationszeit, da die Größe der Maschenzellen mit der Antennengröße auf Basis der Wellenlänge skaliert. Die Simulation einer auf einem Fahrzeug montierten Antenne in einer vollständig arbiträren 3D-EM-Simulation umfasst beide Strukturen. Eine höhere Signalfrequenz bedeutet eine kleinere Wellenlänge und eine kleinere Zellengröße ist erforderlich, um die Antenne unterzubringen. Dieses kleinere Netz bedeutet, dass mehr Netzzellen verwendet werden, um die Teile des Fahrzeugs zu simulieren.
Die Maschengröße kann innerhalb einer Simulation variieren, mit größeren Maschenzellen von 1,25 mm um große physikalische Merkmale wie Stoßfänger und kleineren Maschenzellen von 0,04 mm in der Nähe von feineren Geometrien wie der Speisestruktur einer Sensorantenne, aber es gibt immer eine Grenze für den Bereich der Maschengröße, der für eine einzelne Simulation praktisch oder genau ist. Ein Vorteil der FDTD-Methode der EM-Simulation ist die Möglichkeit, ein Hochfrequenz-Radargerät und eine Antenne zusammen mit dem Stoßfängerbereich eines Autos in einer völlig willkürlichen 3D-EM-Simulation zu simulieren. FDTD bietet sowohl die Möglichkeit, die Netzgröße linear mit der Problemgröße zu skalieren als auch die enorme Effizienz von CUDA-fähigen GPU-Systemen zu nutzen.
FDTD-Simulation skaliert linear mit der Problemgröße
In der Welt der vollständig arbiträren 3D-EM-Simulation gibt es Frequenzbereichs- und Zeitbereichsformulierungen. Obwohl beide Arten den stationären Zustand von Frequenzbereichsdaten, einschließlich S-Parametern, simulieren können, gibt es Unterschiede darin, wie schnell die Simulationszeit mit der Größe des Simulationsproblems wächst. Es gibt EM-Simulationsformulierungen im Frequenzbereich, bei denen die Simulationszeit mit einer Rate von n-quadratisch zunimmt, wobei n die Größe des Problems ist. Einer der Vorteile der FDTD-Simulation für große Probleme ist, dass die Ausführungszeit der Zeitbereichssimulation nur linear mit der Größe des Simulationsproblems wächst1. Je größer das Problem ist, desto größer ist der relative Vorteil der Zeitbereichssimulation gegenüber der Frequenzbereichssimulation.
Zeitbereichssimulatoren führen für jeden Anschluss in einem Entwurf eine vollständige Simulation durch. Bei Frequenzbereichssimulatoren ist dies im Allgemeinen nicht erforderlich. Für einige Simulationen mit vielen Anschlüssen kann eine EM-Formulierung im Frequenzbereich, wie die Finite-Elemente-Methode (FEM), eine gute Wahl sein. Bei einer Antennenanwendung, die nicht viele Signalanschlüsse in einem Entwurf erfordert, hat die Zeitbereichssimulation bei großen Problemgrößen den Vorteil.
FDTD parallelisiert gut mit GPUs
Ein beliebter Ansatz zur schnellen Simulation großer EM-Strukturen ist der Einsatz von CUDA-fähigen Grafikprozessoren. CUDA (Compute Unified Device Architecture) ist eine von NVIDIA entwickelte Plattform für parallele Berechnungen, die in den von NVIDIA hergestellten Grafikprozessoren (GPUs) implementiert ist. Ursprünglich für die Beschleunigung von Video-Grafiken entwickelt, sind GPUs für viele HPC-Anwendungen (High Performance Computing) beliebt.
Der Vergleich zwischen GPU- und herkömmlichen CPU-Rechnern ist dramatisch. GPUs können Hunderte von Prozessoren einsetzen, während CPUs nur einige wenige bieten können. Mehr als die EM-Simulation im Frequenzbereich lässt sich die EM-Simulation im Zeitbereich gut parallelisieren; FDTD kann die von GPUs gebotene Beschleunigung der Simulationszeit voll ausnutzen.
Zusammenfassung
Die Entwicklung eines Kfz-Radarsensors ist eine schwierige Aufgabe, selbst wenn man die Komplexität von Halterungen und Stoßfängermontagen außer Acht lässt. Die computergestützte FDTD-EM-Simulation bietet den Ingenieuren die notwendigen Werkzeuge, um eine realitätsgetreue Analyse des Sensors unter Berücksichtigung der endgültigen Montagekonfigurationen durchzuführen. Ermöglicht wird dies durch die XStream® GPU-Beschleunigungstechnologie von XFdtd, die die EM-Simulationszeit durch die Nutzung von GPUs enorm verkürzt und XF in die Lage versetzt, ultraschnelle numerische FDTD-Berechnungen durchzuführen. Letztendlich können Ingenieure die Automobilsicherheitsbranche voranbringen, indem sie die Zuverlässigkeit und Genauigkeit von Radarsystemen erhöhen.
Referenzen:
[1] Microwave Circuit Modeling Using Electromagnetic Field Simulation von Daniel G. Swanson, Jr. und Wolfgang J. R. Hoefer, Artech House c 2003 ISBN: 1-58053-308-6